- Синхронный двигатель с постоянными магнитами
- Конструкции и типы синхронного электродвигателя с постоянными магнитами
- Принцип работы синхронного двигателя
- Управление синхронным двигателем с постоянными магнитами
- Трапециидальное управление
- Полеориентированное управление
- Полеориентированное управление СДПМ по датчику положения
- Полеориентированное управление СДПМ без датчика положения
- Принцип действия синхронного двигателя
- Устройство синхронного двигателя
- Как работает синхронный двигатель
- Схема запуска двигателя и его регулировка
- Различия синхронных и асинхронных двигателей
Синхронный двигатель с постоянными магнитами
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
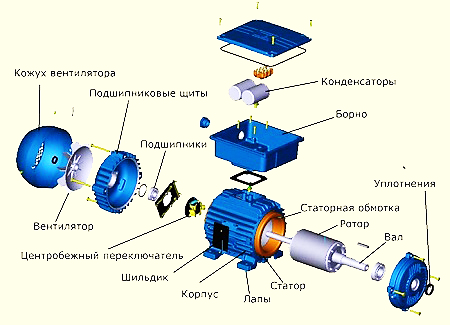
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
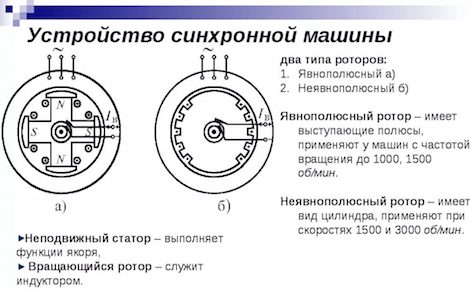
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.

- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM — surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM — interior permanent magnet synchronous motor).


Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].


- Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
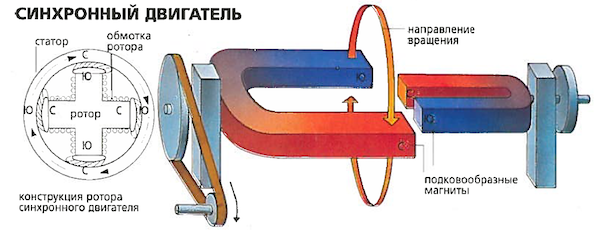
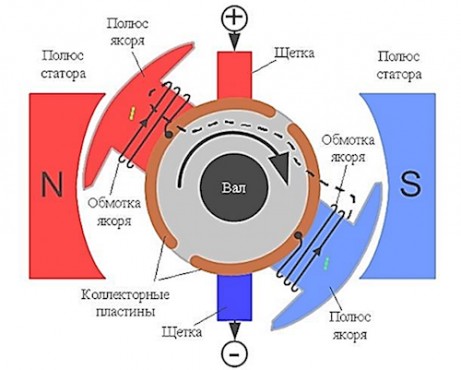
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.


Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
- Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.

Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
- Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
- В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
- Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Устройство синхронного двигателя
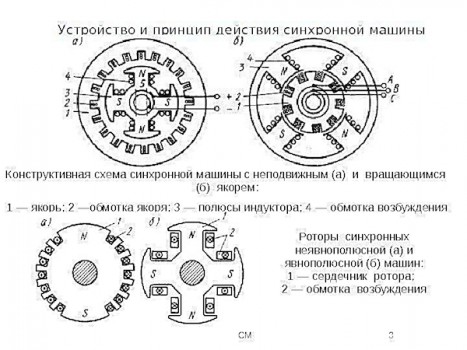
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.

Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.







